











QR কোড

About Us
পণ্য
যোগাযোগ করুন


ই-মেইল

ঠিকানা
22 নং, হংকুয়ান রোড, গুয়াংজু, গুয়াংডং প্রদেশ, চীন

প্রকল্পের পটভূমি:
শিল্প অটোমেশনের দ্রুত বিকাশের সাথে সাথে আরও বেশি সংখ্যক উদ্যোগ বুদ্ধিমান রোবট প্রযুক্তি প্রবর্তনের মাধ্যমে তাদের উত্পাদন লাইনগুলি আপগ্রেড করতে চাইছে। এর মধ্যে, ডিবরিং প্রক্রিয়াটির জন্য, ফুওয়ে ইন্টেলিজেন্ট বিজ্ঞপ্তি গতি সম্পাদনের জন্য রোবটকে গাইড করতে 2 ডি ভিশন ব্যবহার করে, যা কেবল উত্পাদন দক্ষতা উন্নত করতে পারে না, তবে শ্রমের ব্যয়ও হ্রাস করতে পারে এবং পণ্যের মান উন্নত করতে পারে। এই সমাধানটির লক্ষ্য একটি অত্যন্ত স্বয়ংক্রিয় ডিবিউরিং প্রক্রিয়া বুদ্ধিমান উত্পাদন লাইন তৈরি করা।

প্রকল্পের অসুবিধা:
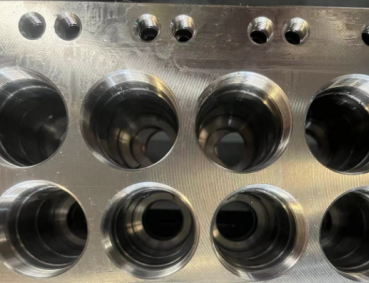
বিভিন্ন ওয়ার্কপিসের আকার, জমিন, আলোক শর্তাদি ইত্যাদির মধ্যে পার্থক্য থাকতে পারে, যার জন্য উচ্চ ভিজ্যুয়াল অবস্থানের নির্ভুলতার প্রয়োজন হয়;
ডিবিউরিং কাজগুলি সম্পূর্ণ করতে রোবটগুলিকে বিজ্ঞপ্তি মোশন ট্র্যাজেক্টরিগুলি সম্পাদন করতে হবে, যার জন্য রোবট নিয়ন্ত্রণ ব্যবস্থাটি রিয়েল টাইমে গতি ট্র্যাজেক্টোরি গণনা করতে এবং সামঞ্জস্য করতে সক্ষম হতে হবে;
ডিবুরিংয়ের গুণমান সরাসরি পণ্যের গুণমান এবং উত্পাদন লাইনের দক্ষতাকে প্রভাবিত করে। কীভাবে একটি দক্ষ এবং স্থিতিশীল ডেবারিং প্রক্রিয়া অর্জন করা যায়, ওয়ার্কপিসের ক্ষতি এড়ানো বা অবশিষ্টাংশগুলি ছেড়ে যাওয়া, প্রকল্পে সমাধান করা দরকার এমন মূল বিষয়।
সমাধান:
1। "হ্যান্ড আই ক্রমাঙ্কন" এর মাধ্যমে রোবট সমন্বয় ব্যবস্থায় ক্যামেরার ক্ষেত্রে পণ্যের অবস্থান এবং রোবট সমন্বয় ব্যবস্থায় পণ্যের অবস্থানের মধ্যে রূপান্তর সম্পর্ক সম্পূর্ণ করুন;
2। ভিজ্যুয়াল গাইডেন্স বা রোবট শিক্ষণ পয়েন্টগুলি ব্যবহার করে, ক্যামেরাটি বস্তুর বিভিন্ন পৃষ্ঠে চিত্রগুলি ক্যাপচার করতে পারে;
3। বিভিন্ন কোণ থেকে শ্যুটিংয়ের ফলে সৃষ্ট চিত্র পরিবর্তনগুলি অর্জন করতে চিত্র বিকৃতি সংশোধন অ্যালগরিদম ব্যবহার করে;
4। পণ্য গর্তের অবস্থানগুলির 2 ডি ক্যামেরা স্বীকৃতি;
5 .. গর্তের অবস্থানের ভিত্তিতে চারটি সমন্বিত পয়েন্ট তৈরি করুন;
6। রোবট চারটি সমন্বিত পয়েন্ট গ্রহণ করে;
7 রোবটটি "বিজ্ঞপ্তি মোশন" কমান্ডের মাধ্যমে বৃত্তাকার গর্ত ক্রুজটি সম্পূর্ণ করতে চারটি পয়েন্টকে ক্রমানুসারে সংযুক্ত করে;
মূল মান:
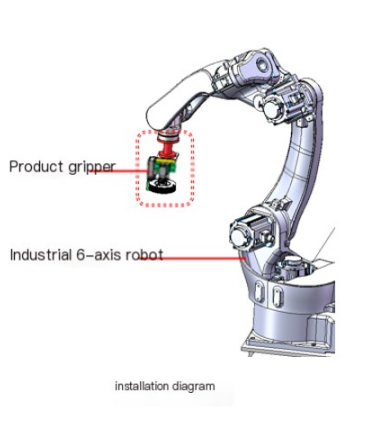
এই সমাধানটি একটি 2 ডি ভিশন সিস্টেম, উচ্চ-নির্ভুলতা রোবট, ডিবিউরিং সরঞ্জাম এবং বুদ্ধিমান নিয়ন্ত্রণ সিস্টেমগুলিকে সংহত করে যা ওয়ার্কপিসগুলির সুনির্দিষ্ট স্বীকৃতি, অবস্থান এবং স্বয়ংক্রিয়ভাবে ডেবারিং অর্জন করতে। রোবটটি স্বয়ংক্রিয়ভাবে ডিবেরিং টাস্কটি সম্পূর্ণ করতে 2 ডি ভিশন সিস্টেম দ্বারা সরবরাহিত ওয়ার্কপিসের অবস্থান এবং ভঙ্গিমা তথ্যের উপর ভিত্তি করে একটি বিজ্ঞপ্তি গতি ট্র্যাজেক্টরি পরিকল্পনা করে এবং সম্পাদন করে।
ডিবরিং প্রক্রিয়াটির অটোমেশন আপগ্রেড 2 ডি ভিশন সিস্টেম, রোবট সিস্টেম এবং বুদ্ধিমান নিয়ন্ত্রণ সিস্টেমকে সংহত করে অর্জন করা হয়েছে। এই সমাধানটি কেবল উত্পাদন দক্ষতার উন্নতি করে না এবং শ্রমের ব্যয় হ্রাস করে, তবে পণ্যের গুণমান এবং উত্পাদন লাইন সুরক্ষাও বাড়ায়।
22 নং, হংকুয়ান রোড, গুয়াংজু, গুয়াংডং প্রদেশ, চীন
