










QR কোড

About Us
পণ্য
যোগাযোগ করুন


ই-মেইল

ঠিকানা
22 নং, হংকুয়ান রোড, গুয়াংজু, গুয়াংডং প্রদেশ, চীন

আধুনিক উত্পাদন শিল্পে যা দক্ষতা, নির্ভুলতা এবং অটোমেশন অনুসরণ করে, সিএনসি মেশিনিং প্রযুক্তির প্রয়োগ ক্রমশ ব্যাপকভাবে বিস্তৃত হয়ে উঠছে। যাইহোক, সিএনসি মেশিন সরঞ্জামগুলির লোডিং এবং আনলোডিং প্রক্রিয়া প্রায়শই একটি বাধা হয়ে ওঠে যা উত্পাদন দক্ষতা সীমাবদ্ধ করে। এই সীমাবদ্ধতা কাটিয়ে উঠতে, ফুওয়েই ইন্টেলিজেন্ট একটি যৌগিক রোবট সিএনসি স্বয়ংক্রিয় লোডিং এবং আনলোডিং সমাধান চালু করেছে, উত্পাদন প্রক্রিয়াটিকে পুনরায় আকারদান করে এবং উত্পাদন দক্ষতা এবং নমনীয়তা উন্নত করে।
প্রকল্পের ওভারভিউ
এই প্রকল্পের লক্ষ্য সিএনসি মেশিনিংয়ের সময় কাঁচামালগুলির স্বয়ংক্রিয় লোডিং এবং আনলোডিং, পাশাপাশি প্রয়োজনীয় পরিদর্শন এবং পরিষ্কার প্রক্রিয়াগুলি অর্জন করা। স্ক্যানিং ক্যামেরা এবং পজিশনিং ভিশন ক্যামেরাগুলির সাথে মিলিত একটি যৌগিক এজিভি (অটোমেটেড গাইডেড যানবাহন) রোবোটিক আর্ম সিস্টেম প্রবর্তন করে, সুনির্দিষ্ট এবং দক্ষ উপাদান হ্যান্ডলিং এবং প্রক্রিয়া পরিচালনা অর্জন করা যেতে পারে।
সিস্টেম রচনা
যৌগিক এজিভি রোবোটিক আর্ম সিস্টেম: এজিভি বডি, রোবোটিক আর্ম, স্ক্যানিং ক্যামেরা, পজিশনিং ভিশন ক্যামেরা ইত্যাদি এর মতো মূল উপাদানগুলি অন্তর্ভুক্ত করে
নিয়ন্ত্রণ ব্যবস্থা: ② অঞ্চল সরঞ্জাম সিস্টেম থেকে টাস্ক সংকেত গ্রহণের জন্য দায়বদ্ধ, এজিভি রোবোটিক এআরএম সিস্টেমকে উপাদান দখল, হ্যান্ডলিং এবং প্লেসমেন্টের মতো ক্রিয়া সম্পূর্ণ করতে নিয়ন্ত্রণ করে।
স্ক্যানিং সিস্টেম: স্ক্যানিং ক্যামেরা সহ উপাদান ট্রেতে কিউআর কোড স্ক্যান করে, উপাদান তথ্য প্রবেশ করে ট্র্যাক করা যায়।
পজিশনিং সিস্টেম: এজিভি রোবোটিক আর্ম সিস্টেমগুলির সুনির্দিষ্ট অবস্থান এবং নেভিগেশন অর্জনের জন্য পজিশনিং ভিশন ক্যামেরাগুলি ব্যবহার করা।
কর্মপ্রবাহ
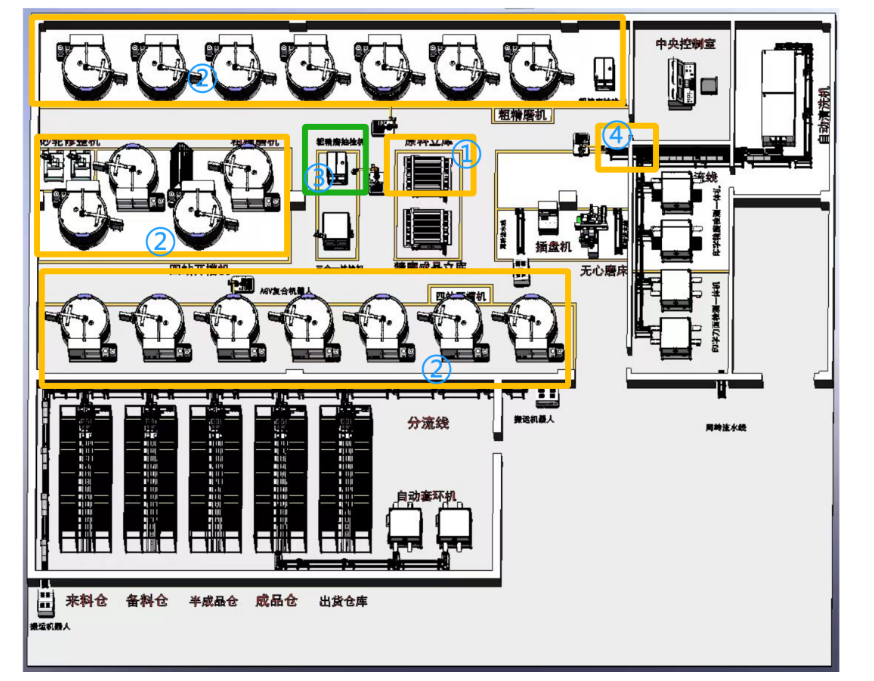
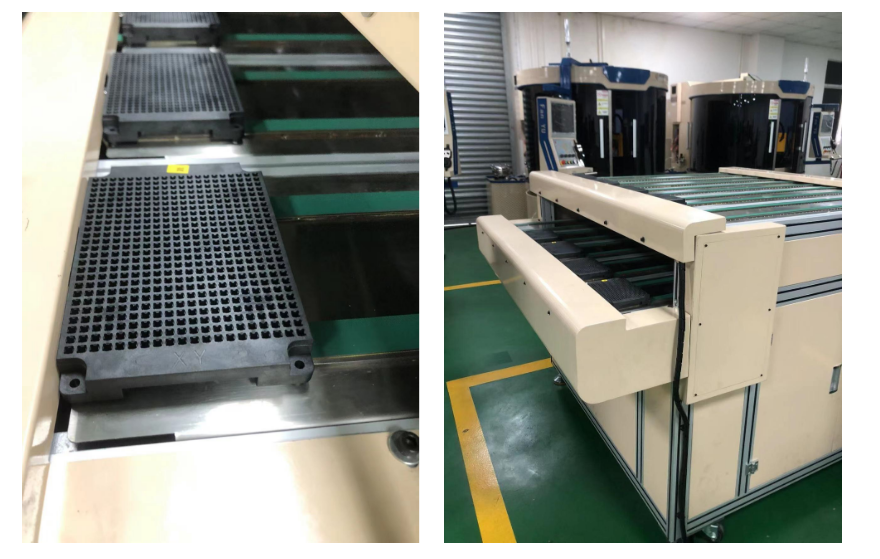
কাঁচামাল দখল: সম্মিলিত এজিভি রোবোটিক আর্ম সিস্টেম নিয়ন্ত্রণ সিস্টেমের নির্দেশাবলী অনুসারে প্রক্রিয়া করার জন্য উপকরণগুলি দখল করতে কাঁচামাল স্টোরেজের প্রথম স্তরে যায়।
প্রক্রিয়াজাতকরণ পদ্ধতি: ক্যাপচার করা উপকরণগুলি মেশিনে অঞ্চলে সরবরাহ করুন ②, মেশিনের অভ্যন্তরীণ স্থান নির্ধারণের অবস্থান অনুসারে এগুলি রাখুন এবং প্রক্রিয়াজাতকরণের জন্য অপেক্ষা করুন।
পরীক্ষার প্রক্রিয়া (al চ্ছিক): সিস্টেম যদি কোনও পরীক্ষার অনুরোধ জারি করে তবে ক্ষেত্রের মেশিনের পরীক্ষার অবস্থান থেকে ছাঁচ ডিস্কটি প্রেরণ করুন ② পরীক্ষার জন্য পরীক্ষার সরঞ্জামগুলির স্থান নির্ধারণের ক্ষেত্রের জন্য। পরিদর্শন শেষ হওয়ার পরে, ছাঁচ ডিস্কটি এলাকায় মেশিনে ফেরত পাঠান ②
পরিষ্কারের প্রক্রিয়া: এলাকায় সরঞ্জাম দ্বারা প্রক্রিয়াজাত উপকরণগুলি ② ② ④ ④ ④ ④ ④ ④ ④ ④ ④ ④ ④ ④ in
প্রযুক্তিগত বাস্তবায়ন
সম্মিলিত এজিভি রোবোটিক এআরএম সিস্টেম: দক্ষ এবং সুনির্দিষ্ট উপাদান হ্যান্ডলিং অর্জনের জন্য উন্নত এজিভি প্রযুক্তি এবং রোবোটিক এআরএম প্রযুক্তি গ্রহণ করা।
স্ক্যানিং সিস্টেম: সঠিক ইনপুট এবং উপাদান সম্পর্কিত তথ্যের ট্র্যাকিং নিশ্চিত করতে উচ্চ-পারফরম্যান্স স্ক্যানিং ক্যামেরা ব্যবহার করা।
পজিশনিং সিস্টেম: এজিভি রোবোটিক আর্ম সিস্টেমগুলির সুনির্দিষ্ট অবস্থান এবং নেভিগেশন অর্জনের জন্য উন্নত ভিজ্যুয়াল পজিশনিং প্রযুক্তি ব্যবহার করা।
নিয়ন্ত্রণ ব্যবস্থা: পুরো সিস্টেমের স্থিতিশীল অপারেশন এবং দক্ষ সহযোগিতা নিশ্চিত করতে একটি নির্ভরযোগ্য নিয়ন্ত্রণ ব্যবস্থা গ্রহণ করা।
সিস্টেম সুবিধা
অটোমেশনের উচ্চ ডিগ্রি: সিএনসি মেশিনিং প্রক্রিয়াতে কাঁচামালগুলি সনাক্তকরণ এবং পরিষ্কার করা স্বয়ংক্রিয় লোডিং এবং আনলোডিং উপলব্ধি করা, উত্পাদন দক্ষতা উন্নত করা।
উচ্চ নির্ভুলতা: স্ক্যানিং ক্যামেরা এবং অবস্থান ভিজ্যুয়াল ক্যামেরা ব্যবহার করে সঠিক ইনপুট এবং উপাদান তথ্যের সুনির্দিষ্ট অবস্থান অর্জন করা যেতে পারে।
শক্তিশালী নমনীয়তা: বিভিন্ন উত্পাদনের প্রয়োজনীয়তা পূরণের জন্য কর্মপ্রবাহটি প্রকৃত প্রয়োজন অনুসারে নমনীয়ভাবে সামঞ্জস্য করা যেতে পারে।
শক্তিশালী ট্রেসেবিলিটি: পুরো প্রক্রিয়া জুড়ে উপাদান সম্পর্কিত তথ্যগুলি ট্র্যাক এবং ট্রেস করতে স্ক্যানিং সিস্টেম ব্যবহার করে, পণ্যের মান পরিচালনার স্তরটি উন্নত করা যেতে পারে।
22 নং, হংকুয়ান রোড, গুয়াংজু, গুয়াংডং প্রদেশ, চীন
