




![নতুন পণ্য] এফজিএস -২২ রঙ সেন্সর: দীর্ঘ দূরত্বের সনাক্তকরণ + বুদ্ধিমান অ্যান্টি-কাঁপানো, শিল্প রঙ সনাক্তকরণের একটি নতুন মাত্রা খোলার!](/upload/7597/2025060516280199525.jpg "নতুন পণ্য] এফজিএস -২২ রঙ সেন্সর: দীর্ঘ দূরত্বের সনাক্তকরণ + বুদ্ধিমান অ্যান্টি-কাঁপানো, শিল্প রঙ সনাক্তকরণের একটি নতুন মাত্রা খোলার!")





QR কোড

About Us
পণ্য
যোগাযোগ করুন


ই-মেইল

ঠিকানা
22 নং, হংকুয়ান রোড, গুয়াংজু, গুয়াংডং প্রদেশ, চীন

প্রকল্পের ওভারভিউ
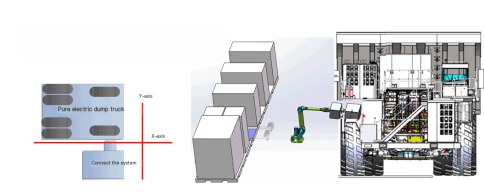
এই প্রকল্পের লক্ষ্য শানসি অঞ্চলে অন্দর উত্পাদন শর্তে গ্রাহকদের চার্জিং চাহিদা মেটাতে একটি দক্ষ এবং স্থিতিশীল ডাম্প ট্রাক স্বয়ংক্রিয় চার্জিং সিস্টেম ডিজাইন করা। সিস্টেমটিকে ইঞ্জিনিয়ারিং যানবাহনের মানহীন অপারেশন এবং নিয়ন্ত্রণ অর্জন করতে হবে, কেবলমাত্র উত্পাদন লাইনের অবিচ্ছিন্ন অপারেশন প্রয়োজনীয়তাগুলি পূরণ করতে পয়েন্ট এ এবং বি এর হ্যান্ডলিং এবং স্বয়ংক্রিয় চার্জিং ফাংশনগুলি সম্পন্ন করতে হবে।
সিস্টেম রচনা
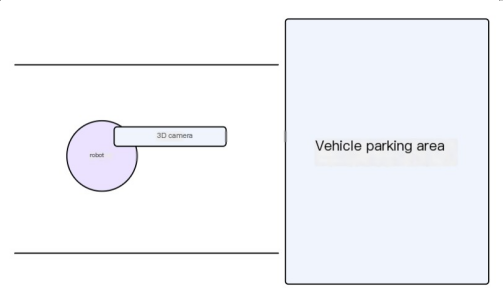
ভিজ্যুয়াল পজিশনিং সিস্টেম: ডাম্প ট্রাকগুলিতে চার্জিং পোর্টের সুনির্দিষ্ট অবস্থান অর্জনের জন্য উচ্চ-নির্ভুলতা ক্যামেরা এবং ভিজ্যুয়াল অ্যালগরিদমগুলি ব্যবহার করা। ভিজ্যুয়াল সিস্টেমের বিভিন্ন অভ্যন্তরীণ পরিবেশে স্থিতিশীল অপারেশন নিশ্চিত করে ধুলাবালি এবং সরাসরি সূর্যের আলোকে প্রতিরোধ করার ক্ষমতা থাকা দরকার।
রোবট এবং বন্দুক পুশিং মেকানিজম: 3 মি বা তারও বেশি বাহু স্প্যান সহ শিল্প রোবটগুলি নির্বাচিত হয়, বিশেষভাবে ডিজাইন করা বন্দুকের ধাক্কা দেওয়ার প্রক্রিয়া দিয়ে সজ্জিত। চার্জিং বন্দুকটি সঠিকভাবে এবং দ্রুত চার্জিং বন্দরে serted োকানো যেতে পারে তা নিশ্চিত করার জন্য বন্দুকের ধাক্কা দেওয়ার প্রক্রিয়াটির পর্যাপ্ত থ্রাস্ট এবং নির্ভুলতা থাকা উচিত।
চার্জিং সিস্টেম: 3 মেগাওয়াট উচ্চ-পাওয়ার চার্জিং সরঞ্জাম সহ সজ্জিত, এটি নিশ্চিত করে যে ডাম্প ট্রাকটি অল্প সময়ের মধ্যে পুরোপুরি চার্জ করা যেতে পারে এবং উত্পাদন দক্ষতা উন্নত করতে পারে।
নিয়ন্ত্রণ ব্যবস্থা: একটি সংহত নিয়ন্ত্রণ ব্যবস্থার মাধ্যমে, ভিজ্যুয়াল পজিশনিং, রোবট গতি এবং চার্জিং প্রক্রিয়াটির সুনির্দিষ্ট নিয়ন্ত্রণ অর্জন করা যেতে পারে। নিয়ন্ত্রণ ব্যবস্থায় উচ্চ অটোমেশন এবং বুদ্ধি বৈশিষ্ট্য থাকতে হবে এবং মানহীন স্বয়ংক্রিয় চার্জিং অর্জন করতে সক্ষম হওয়া উচিত।
কর্মপ্রবাহ
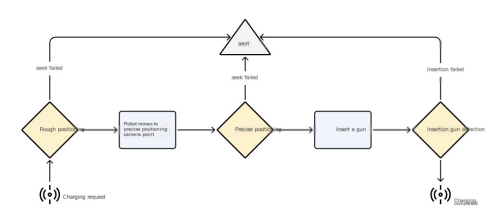
স্ব -ডাম্পিং ট্রাক পজিশনিং: ভিজ্যুয়াল পজিশনিং সিস্টেমের মাধ্যমে ডাম্প ট্রাকের চার্জিং পোর্ট অবস্থানটি সনাক্ত করুন এবং সনাক্ত করুন।
রোবট মোশন: কন্ট্রোল সিস্টেমটি রোবটকে ভিজ্যুয়াল পজিশনিং ফলাফলের উপর ভিত্তি করে ডাম্প ট্রাকের চার্জিং পোর্টের কাছে স্থানান্তরিত করতে গাইড করে।
বন্দুক সন্নিবেশকে ধাক্কা দেওয়া: রোবটটি একটি ধাক্কা বন্দুক প্রক্রিয়া দিয়ে সজ্জিত, যা সঠিকভাবে এবং দ্রুত চার্জিং বন্দুকটি ডাম্প ট্রাকের চার্জিং বন্দরে সন্নিবেশ করে।
চার্জিং প্রক্রিয়া: চার্জিং সিস্টেমটি ডাম্প ট্রাকটি প্রিসেট পাওয়ার স্তর বা সময় না পৌঁছানো পর্যন্ত চার্জ করা শুরু করে।
রোবট সরিয়ে নেওয়া: চার্জিং শেষ হওয়ার পরে, রোবট চার্জিং পোর্টটি সরিয়ে নেবে এবং পরবর্তী ডাম্প ট্রাকের আগমনের জন্য অপেক্ষা করবে।
মূল প্রযুক্তি
ভিজ্যুয়াল পজিশনিং প্রযুক্তি: গভীর শিক্ষার মতো অ্যালগরিদম ব্যবহার করে ভিজ্যুয়াল পজিশনিং সিস্টেমগুলির যথার্থতা এবং স্থায়িত্ব উন্নত করা যেতে পারে।
রোবট নিয়ন্ত্রণ প্রযুক্তি: চার্জিং দক্ষতা উন্নত করতে রোবট গতি ট্র্যাজেক্টোরি এবং গতি অনুকূল করুন।
বন্দুকের পুশিং মেকানিজমের নকশা: নিশ্চিত করুন যে বন্দুকের ধাক্কা দেওয়ার প্রক্রিয়াটির কাঠামোগত কমপ্যাক্টনেস এবং নির্ভরযোগ্যতা বিবেচনা করার সময় যথেষ্ট পরিমাণে থ্রাস্ট এবং নির্ভুলতা রয়েছে।
ঝুঁকি প্রতিক্রিয়া
ইনডোর পরিবেশগত সুরক্ষা: একটি পরিষ্কার এবং শুকনো অভ্যন্তরীণ পরিবেশ নিশ্চিত করুন, ভিজ্যুয়াল পজিশনিং সিস্টেমে ধুলো এবং সরাসরি সূর্যের আলোকে হ্রাস করুন।
হার্ডওয়্যার রক্ষণাবেক্ষণ: নিয়মিতভাবে হার্ডওয়্যার যেমন রোবট এবং ভিজ্যুয়াল পজিশনিং সিস্টেমগুলি তাদের স্বাভাবিক অপারেশন নিশ্চিত করার জন্য রক্ষণাবেক্ষণ এবং রক্ষণাবেক্ষণ করুন।
পেশাদার মূল্যায়ন: সমাধানের সুরক্ষা এবং সম্ভাব্যতা নিশ্চিত করার জন্য পেশাদারদের বন্দুক পুশিং প্রক্রিয়া, চার্জিং সিস্টেম ইত্যাদি মূল্যায়ন ও অনুকূল করার জন্য আমন্ত্রণ জানান।
22 নং, হংকুয়ান রোড, গুয়াংজু, গুয়াংডং প্রদেশ, চীন
