









QR কোড

About Us
পণ্য
যোগাযোগ করুন


ই-মেইল

ঠিকানা
22 নং, হংকুয়ান রোড, গুয়াংজু, গুয়াংডং প্রদেশ, চীন

1 、 প্রকল্পের ওভারভিউ
এই পরিকল্পনার লক্ষ্য হ'ল মেশিন ভিশন এবং ফোর্স কন্ট্রোলে একটি বিশ্ববিদ্যালয় পরীক্ষাগারের শিক্ষার প্রয়োজনীয়তা মেটাতে একটি রোবট শিক্ষা অনুশীলন প্ল্যাটফর্ম সিস্টেমটি কাস্টমাইজ করা। রোবট নিয়ন্ত্রণ, ভিজ্যুয়াল ইন্সপেকশন এবং ফোর্স কন্ট্রোল অ্যাসেমব্লির মতো ফাংশন অর্জনের জন্য এবং পরবর্তী কার্যকরী সম্প্রসারণের জন্য ওপেন-সোর্স উচ্চতর কম্পিউটার সফ্টওয়্যার সরবরাহ করার জন্য অউবো-আই 5 সহযোগী রোবট, হিকভিশন ইন্ডাস্ট্রিয়াল ক্যামেরা, 3 ডি ক্যামেরা এবং সিক্স এক্সিস ফোর্স সেন্সরের চারপাশে সিস্টেমটি বিকাশ করা হবে।

2 、 সিস্টেম হার্ডওয়্যার রচনা
রোবট: আওবো-আই 5 সহযোগী রোবট গ্রহণ করা, এটিতে উচ্চ নির্ভুলতা এবং উচ্চ সুরক্ষার বৈশিষ্ট্য রয়েছে এবং এটি শেখানোর পরিস্থিতিগুলির জন্য উপযুক্ত।
ক্যামেরা: হিকভিশন ইন্ডাস্ট্রিয়াল ক্যামেরা এবং 3 ডি ক্যামেরা সহ, ওয়ার্কপিসগুলির চিত্রের তথ্য পেতে, traditional তিহ্যবাহী চিত্র প্রক্রিয়াকরণ এবং গভীর শেখার চিত্র সনাক্তকরণকে সমর্থন করে।
ছয়টি মাত্রিক ফোর্স সেন্সর: কুনওয়ে (কেডব্লিউআর 75) বা অন্যান্য ব্র্যান্ডগুলি রোবট এন্ড ইফেক্টর এবং ওয়ার্কপিসের মধ্যে ফোর্স ইন্টারঅ্যাকশন তথ্যের রিয়েল-টাইম পর্যবেক্ষণের জন্য নির্বাচিত হয়।
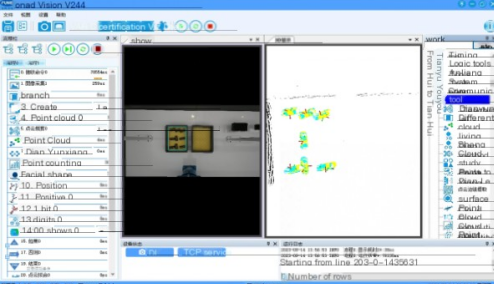
3 、 উচ্চ কম্পিউটার সফ্টওয়্যার ডিজাইন
বেসিক ফাংশন:
রোবট নিয়ন্ত্রণ: সংযোগ, সংযোগ বিচ্ছিন্নতা, যৌথ বা রোবটগুলির ভঙ্গি নিয়ন্ত্রণের মতো ফাংশনগুলি প্রয়োগ করুন।
ক্যামেরা নিয়ন্ত্রণ: ক্যামেরা সংযোগ, সংযোগ বিচ্ছিন্নতা এবং চিত্র অধিগ্রহণের মতো ফাংশনগুলি প্রয়োগ করুন।
স্থিতি প্রদর্শন: রোবটের যৌথ এবং পোজ স্থিতি, ছয় অক্ষ ফোর্স সেন্সরের স্থিতি পরামিতি এবং ক্যামেরা দ্বারা ক্যাপচার করা চিত্রগুলির রিয়েল টাইম ডিসপ্লে।
এক্সক্লুসিভ বৈশিষ্ট্য:
শ্যাফ্ট হোল অ্যাসেম্বলি: ভিজ্যুয়াল ইন্সপেকশন এবং ফোর্স কন্ট্রোল প্রযুক্তির সাথে মিলিত উপরের কম্পিউটারের ক্রিয়াকলাপের মাধ্যমে, শ্যাফ্ট গর্তের স্বয়ংক্রিয় সমাবেশ ফাংশনটি অর্জন করা হয়।
ইন্টারফেস ডিজাইন: উপরের কম্পিউটার ইন্টারফেসটি সংক্ষিপ্ত, পরিষ্কার এবং পরিচালনা করা সহজ হওয়া উচিত। ইন্টারফেসে বেসিক ফাংশন বোতাম এবং একটি স্থিতি প্রদর্শন ক্ষেত্র অন্তর্ভুক্ত করা উচিত, পাশাপাশি শ্যাফ্ট হোল অ্যাসেম্বলি ফাংশনে অ্যাক্সেস সরবরাহ করা উচিত।
4 、 ফাংশন বাস্তবায়ন
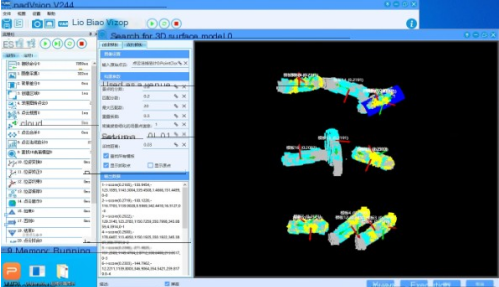
মেশিন ভিশন:
Dition তিহ্যবাহী চিত্র সনাক্তকরণ: টেমপ্লেট ম্যাচিং, সার্কেল ফিটিং, এজ ফিটিং এবং ওয়ার্কপিসগুলি সনাক্ত করতে এবং স্বীকৃতি দেওয়ার জন্য অন্যান্য পদ্ধতিগুলি ব্যবহার করে বারকোড, কিউআর কোড, চরিত্রের সংখ্যাগুলির পাশাপাশি গ্রেস্কেল অঞ্চল এবং প্লেটের পরিমাণের গণনা সমর্থন করে।
গভীর শেখার চিত্র সনাক্তকরণ: গভীর শিক্ষার অ্যালগরিদমের মাধ্যমে স্বয়ংক্রিয় স্বীকৃতি এবং ওয়ার্কপিসগুলির স্থানীয়করণ। যদিও গভীর শিক্ষার এখনও চিত্রগুলির ম্যানুয়াল টীকা প্রয়োজন, আমরা প্রশিক্ষণের দক্ষতা এবং স্বীকৃতি নির্ভুলতা উন্নত করার জন্য প্রচেষ্টা করব, ধীরে ধীরে টীকাগুলির কাজের চাপ হ্রাস করব।
বিদ্যুৎ নিয়ন্ত্রণ সমাবেশ:
ছয়টি মাত্রিক বল সেন্সর থেকে ডেটা সংমিশ্রণ, রোবট এন্ড ইফেক্টর এবং ওয়ার্কপিসের মধ্যে ফোর্স ইন্টারঅ্যাকশন নিয়ন্ত্রণ অর্জন করে এবং শ্যাফ্ট গর্তের সম্পূর্ণ সুনির্দিষ্ট সমাবেশ।
5 、 প্রকল্প ঝুঁকি এবং প্রতিক্রিয়া ব্যবস্থা
ছয় অক্ষ ফোর্স সেন্সরগুলির সাথে সহযোগিতার ঝুঁকি: ছয়টি অক্ষ ফোর্স সেন্সরগুলির সাথে সহযোগিতার অভাবের কারণে কিছু প্রযুক্তিগত অসুবিধা এবং অনিশ্চয়তা থাকতে পারে। আমরা সমস্যাটি মোকাবেলায় এবং সেন্সরগুলির মসৃণ সংহতকরণ এবং স্থিতিশীল অপারেশন নিশ্চিত করতে একটি পেশাদার প্রযুক্তিগত টিমের ব্যবস্থা করব।
গভীর শিক্ষার ঝুঁকি চিত্র সনাক্তকরণের ঝুঁকি: গভীর শিক্ষার চিত্র সনাক্তকরণের জন্য একটি ক্লিকের প্রশিক্ষণের প্রয়োজনীয়তা পূরণ করার সময় স্বীকৃতি নির্ভুলতা এবং দক্ষতার একটি নির্দিষ্ট স্তরের প্রয়োজন। এক ক্লিক প্রশিক্ষণ বাস্তবায়নের উপায়গুলি অন্বেষণ করার সময় আমরা স্বীকৃতি নির্ভুলতা এবং দক্ষতা উন্নত করতে গভীর শিক্ষার অ্যালগরিদমগুলি অনুকূল করে চলব।
6 、 পোস্ট সম্প্রসারণ এবং দৃশ্যের স্যুইচিং
উচ্চতর কম্পিউটার সফ্টওয়্যার ওপেন সোর্স ডিজাইন গ্রহণ করে, যা পরবর্তী শিক্ষায় প্রয়োজন অনুসারে কার্যকরী সম্প্রসারণ এবং দৃশ্যের স্যুইচিংয়ের সুবিধার্থে। উদাহরণস্বরূপ, শ্যাফ্ট গর্তগুলির সমাবেশের দৃশ্যটি সূক্ষ্ম গিয়ারগুলি জাল বা স্বীকৃতি এবং অন্যান্য ওয়ার্কপিসগুলি উপলব্ধি করার মতো কার্যগুলিতে স্যুইচ করা যেতে পারে। ওপেন-সোর্স প্রোগ্রামগুলি সংশোধন এবং ডিবাগ করে, বিভিন্ন পরিস্থিতিতে রোবট অপারেশন এবং ভিজ্যুয়াল সনাক্তকরণ ফাংশন অর্জন করা সহজ।
এই পরিকল্পনাটি রোবট, ক্যামেরা এবং সিক্স অ্যাক্সিস ফোর্স সেন্সরগুলির মতো হার্ডওয়্যার সংস্থানগুলিকে সংহত করে, রোবট শিক্ষা অনুশীলন প্ল্যাটফর্মের জন্য সমৃদ্ধ এবং সহজেই প্রসারণযোগ্য শিক্ষার পরিবেশ সরবরাহ করতে ওপেন-সোর্স উচ্চতর কম্পিউটার সফ্টওয়্যার ডিজাইনের সাথে মিলিত। ব্যবহারিক প্ল্যাটফর্মগুলির ব্যবহারের মাধ্যমে, শিক্ষার্থীরা মেশিন ভিশন এবং ফোর্স কন্ট্রোল প্রযুক্তির নীতিগুলি এবং অ্যাপ্লিকেশনগুলির আরও গভীর ধারণা অর্জন করতে পারে এবং তাদের ব্যবহারিক এবং উদ্ভাবনী দক্ষতার উন্নতি করতে পারে।
22 নং, হংকুয়ান রোড, গুয়াংজু, গুয়াংডং প্রদেশ, চীন
